國(guó)內(nèi)首個(gè)!太空采礦機(jī)器人來了
科技日?qǐng)?bào) 2025-03-17 13:46:09
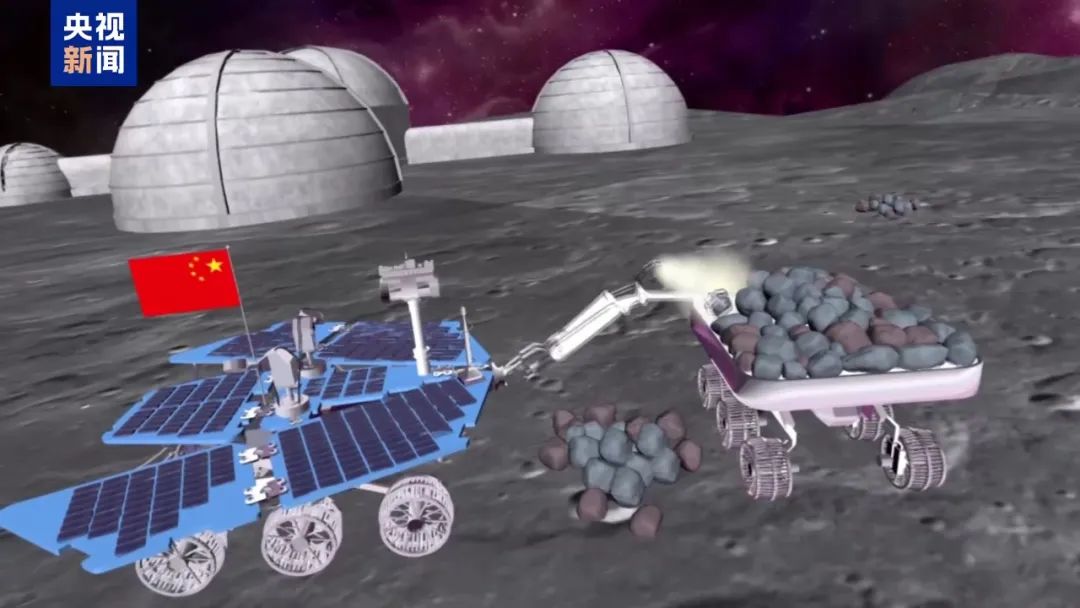
太空采礦�,這個(gè)以往在科幻小說和電影中出現(xiàn)的場(chǎng)景�����,正在逐步走向現(xiàn)實(shí)�。近日,我國(guó)首臺(tái)太空采礦機(jī)器人在中國(guó)礦業(yè)大學(xué)誕生�����。
中國(guó)礦業(yè)大學(xué)劉新華教授團(tuán)隊(duì)研發(fā)的多功能太空采礦機(jī)器人�����,其基本形態(tài)為六足模式�����,有三個(gè)輪足和三個(gè)爪足�。之所以這樣設(shè)計(jì),主要是為了適應(yīng)太空中的微重力環(huán)境�。太空采礦機(jī)器人要在地外星體上完成地質(zhì)勘探和礦物采集任務(wù)�,鉆探屬于必備技能�。在地球重力環(huán)境下,機(jī)器人本身的重量就足以支撐鉆頭鉆進(jìn)�,而月球重力只有地球的六分之一,小行星上大多是低微重力�����,如何讓鉆頭順利鉆進(jìn)星體表面就成了大問題�����。為了解決失重帶來的漂移�,科研團(tuán)隊(duì)想到了模擬昆蟲的爪刺結(jié)構(gòu),于是為太空采礦機(jī)器人設(shè)計(jì)了特殊的爪刺足�。劉新華教授介紹,這種結(jié)構(gòu)屬于陣列式的爪刺�����,微重力環(huán)境下�,它的附著能力更強(qiáng),抓地能力更強(qiáng)�����。在微重力環(huán)境下不僅能夠讓機(jī)器人固定住進(jìn)行采樣,還能根據(jù)地形進(jìn)行移動(dòng)�。不僅能適應(yīng)太空的微重力環(huán)境,“采用仿生六足移動(dòng)結(jié)構(gòu)”的機(jī)器人足末端有車輪和錨固結(jié)構(gòu)兩種配置�,讓它可以在小行星坑洼不平的地面上行走。目前�,太空采礦機(jī)器人原型機(jī)已經(jīng)向有關(guān)部門申請(qǐng)專利,并且通過了初審�����。劉新華教授表示�����,科研團(tuán)隊(duì)已經(jīng)實(shí)現(xiàn)了太空微重力的等效實(shí)驗(yàn)�����,這個(gè)機(jī)器人在模擬月壤的環(huán)境下�����,實(shí)現(xiàn)了行走�、錨固�,甚至采樣�����。
責(zé)編:周倜
一審:周倜
二審:劉文韜
三審:楊又華
來源:科技日?qǐng)?bào)

 下載APP
下載APP 報(bào)料
報(bào)料 關(guān)于
關(guān)于
 湘公網(wǎng)安備 43010502000374號(hào)
湘公網(wǎng)安備 43010502000374號(hào)